 首页
首页 关于我们
关于我们 产品与服务
产品与服务 人才招聘
人才招聘 联系我们
联系我们
水下机器人(ROV)是怎样设计出来的?
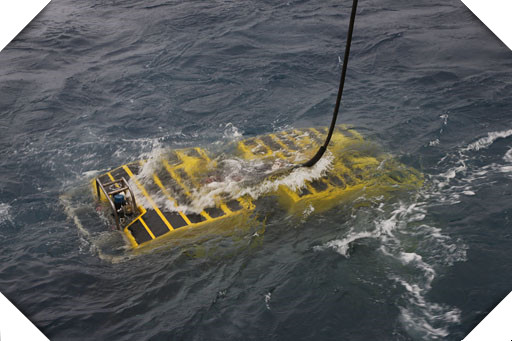
在水下机器人(ROV)的方案设计阶段,需要进行仿真技术研究,包括两个部分:(1)平台运动仿真按给定的技术指标和水下机器人(ROV)的工作方式,设计机器人平台外形并进行流体动力试验,获得仿真用的水动力参数。建立运动数学模型并确定边界条件后,利用流体动力学参数和工况进行运动仿真,求解平台在各种工况下的动态响应,并根据技术指标评价平台的运动状态。如有差异,调整平台尺寸、重心浮动中心等技术参数后,再次模拟平台,......直到满足要求。
(2)控制硬件和软件的仿真对水中控制系统的调试和测试有很大的风险。因此,在将控制硬件和软件加载到平台之前,有必要在实验室对单机性能进行测试,然后在综合系统模拟器上进行地面仿真测试,并在仿真后对性能进行评估。内容包括动密封、抗干扰、机电匹配、软件调试。根据结果,进行修改和完善。因而需研究和开发一套用于控制系统仿真的仿真器。模拟器主要由仿真平台、等效负载、仿真通信接口、仿真工作站等组成。在仿真器上对控制系统的仿真,可以减少湖海试时的调试工作量,避免由海中不确定因素带来的麻烦。
